近日,西安交通大学&荷兰莱顿大学联培博士毕业生刘静冉,和所在团队的马丁·范·赫克(Martin van hecke)教授以及金立帅博士等,基于机械计算机提出一种新的设计原理。
 “迟滞子”(hysteron),是本次研究的主要对象,它是具有“激励-响应”迟滞现象的一种单元。
“迟滞子”(hysteron),是本次研究的主要对象,它是具有“激励-响应”迟滞现象的一种单元。在本次工作之中,课题组基于串联耦合双稳态机械单元,来研究和控制耦合迟滞子的状态转换行为。
期间,他们通过制备机械计算机,让一些有限状态机得以重现。
机械计算机不会受到电磁辐射和温度等极端条件的影响,因此在太空、深海、高山等极端环境中,将能用于执行计算任务。
机械计算机也能更好地确保可靠性和安全性,因此在军事、航空航天、深海勘探等特殊场景中,将能用于执行特定的计算任务。
另外,由于此次工作是一个理论主导型成果,所提出的设计原理并不仅仅局限于机械载荷,也能扩展到其他物理场景之中。
图 | 相关论文(来源:PNAS)

利用尽可能简单的结构,实现尽可能复杂的计算
据了解,对于一个完整的计算系统来说,它需要具备两个基本的模块:信息处理和信息存储。同时,还需要加上相应的算法、输入/输出模块。
而信息存储能力,则广泛存在于各种材料中,例如铁性材料、阻挫介质、形状记忆合金等。
人们一般通过数字电路来实现算法处理和信息处理,比如生活中常见的电脑、红绿灯、自动售货机等。
然而,在一些极端环境譬如极端温度之下,电路和电源设备极有可能失效,从而导致计算结果不可靠。
那么,在这种情况下该如何进行计算?业内人士很自然地会联想到电子计算机的前身:机械计算机。
其中,最典型的例子包括加法器和差分机等,它们可以处理一些常见的数学计算。而关于机械计算机的使用,此前在二战时期就已达到巅峰。
以往的机械计算机,一般由齿轮和轴承等机构部件组成。不仅结构复杂、而且十分笨重。在电子计算技术高速发展的 1970 年代后,它们逐渐被淘汰出局。
而如今,当刘静冉等人决定重新研究机械计算时,他们非常希望利用尽可能简单的结构,来实现尽可能复杂的计算功能。
阻挫介质,是实现复杂机械计算的潜力型平台。在特定载荷之下,其内部构筑单元具有两种不同的稳定构型,即具有“0”和“1”两种状态的“机械比特”。
不同机械比特的状态之间存在竞争关系,这会让整个系统呈现出多个稳态,从而能够用于信息存储。
对于系统的不同稳态来说,可以通过外加载荷来相互转换,进而让系统具备处理载荷信息的能力。
而由外加载荷定义的状态转换规律,则能构成特定的算法。这时,针对机械超材料加以合理设计,就能实现机械计算。
对于阻挫介质来说,它里面的单元之间存在相互连接和相互影响关系。
然而,对于领域内的此前研究来说,它们并未考虑相互作用对于系统状态切换行为的影响。
而在外加载荷的情况之下,各个比特的状态切换是相互独立的,这极大限制了系统的运算能力。
因此,该团队希望利用比特之间的相互作用,来实现非平凡的系统状态的切换路径,从而提升系统的运算能力。

一次跨越中国和荷兰的研究
据介绍,刘静冉最早接触到的是具象化“机械比特”,其由一种双稳态的曲梁结构构成。
曲梁的横向力-位移曲线是非单调的,它的外力会随着位移呈现出“增加-减小-再增加”的趋势。同时,曲梁会逐渐朝着相反方向弯曲。
当将若干个相同的曲梁加以串联,那么在外加荷载的过程中,外力就会突然减小。
同时,某一层曲梁的弯曲方向会突然转变,而其他曲梁的弯曲方向则会保持不变。
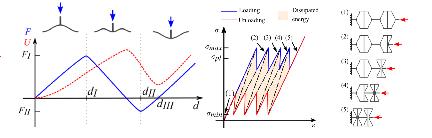 图 | 单个(左)及串联(右)曲梁加卸载行为示意图(来源:PNAS)
图 | 单个(左)及串联(右)曲梁加卸载行为示意图(来源:PNAS)在西安交通大学读博时,刘静冉的博士导师是刘益伦教授。当时,他建议刘静冉针对上述行为开展深入研究。
因此,刘静冉在读博期间的第一个课题便是:研究串联曲梁的动态力学行为,以及研究层数对于串联曲梁加卸载行为的影响。
后来,她发现在加载和卸载的过程中,当一层曲梁发生突然转变时,尽管其余曲梁的取向不会发生变化,但是变形量会出现减小或增加。
于是,她开始设想:能否将不同的曲梁串联起来,这样一来当一个曲梁的取向发生变化时,带动另一个曲梁的取向发生反向变化?
再后来,刘静冉去荷兰莱顿大学参加联合培养,基于此前的研究积累,她继续深耕于这一细分领域。
当时她在荷兰的合作导师和同事,正在针对多稳态结构的状态切换和记忆行为进行理论研究。
具体来说:他们将组成多稳态结构的双稳态单元称为“迟滞子”,以此来描述激励-响应曲线所显示的滞后现象。
而这种现象出现的原因是由于:在外部激励下的响应之下,单元之中存在两个不同的稳态路径。
因此,会在“加载-卸载”的时候,自发地选择不同的路径,并在某个节点上发生路径切换,从而导致加卸载曲线无法重合。
这两个稳态路径,对应着迟滞子的两种不同的状态。而对于这两种状态,可以用二进制数“0”和“1”来表示。
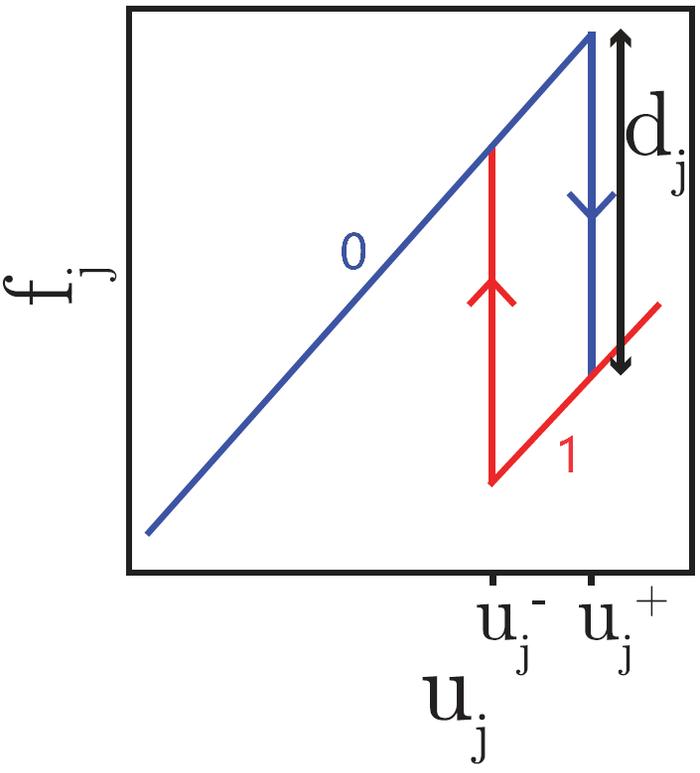 图 | “迟滞子”加卸载曲线示意图(来源:PNAS)
图 | “迟滞子”加卸载曲线示意图(来源:PNAS)其还发现:当把耦合影响也考量进去之时,理论上可以预测更多的状态切换路径。
以包含两个比特的系统为例:在不考虑耦合的情况下,系统在外载增加的时候,只有一种可能的状态切换路径即“00”→“01”→“11”。
而当考虑串联耦合的影响,系统有可能出现另一种状态切换路径即“00”→“01”→“10”→“11”。
通过此,不仅能预测不同的响应行为,更显明了系统记忆能力的增加。
即在系统的状态切换之中,增加了一个步骤。而这表明:它能识别和“记住”的载荷范围也有所增加。
与此同时,系统的状态、以及其在加卸载过程中的切换路径,可以用状态切换图(t-graph)表示。
相比那些没有耦合的系统,引入串联耦合之后,状态切换图的数量开始大大增加。
例如:含有两个比特的系统状态切换图的数量,由 2 增加为 5;含有三个比特的系统状态切换图的数量,由 6 增加为 44;所含比特数量更多的系统,其状态切换图的数量增幅也更大。
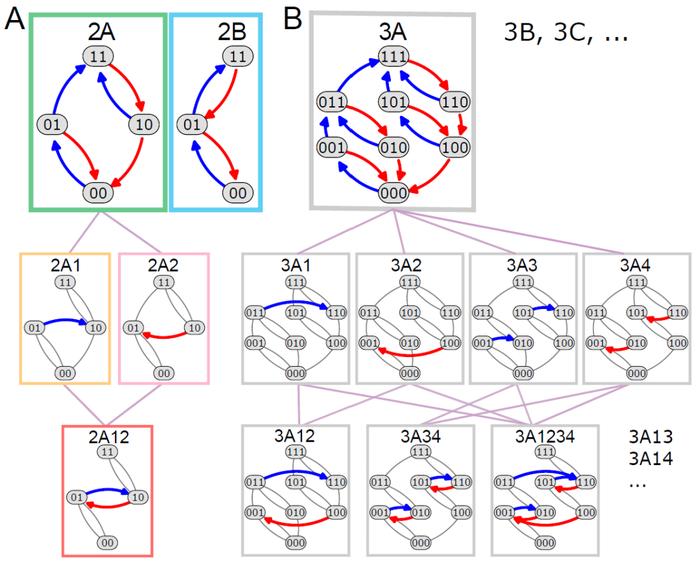
图 | 双比特及三比特串联系统状态切换图。第一行为未考虑比特间耦合的所有可能路径,第二行及第三行为引入不同耦合系数后的结果(来源:PNAS)
研究进行到这里,课题组意识到可以将曲梁作为“机械比特”,以此来具象化地展示理论结果:即曲梁的两个相反的取向,代表着机械比特的两个不同状态。
同时,针对双比特串联系统,他们希望实现所有可能的切换路径,而这就需要将两个曲梁串联起来。
但是,一个难题横亘在他们面前:当串联曲梁数量较少时,很难实现曲梁取向的突然变化。
原因在于:曲梁的变形是连续的,而两个不同的取向之间没有明显的分界点,因此这与“比特”的概念不符。
经过仔细推敲之后,课题组发现实现曲梁取向突然转变的关键在于:串联系统要足够的软。
于是,他们找来一个非线性弹簧,其由两个圆环组成。随后,该团队将非线性弹簧与曲梁串联起来,借此增加系统的柔度。
随后,其又通过有限元计算,将所有双比特串联系统的状态切换图模拟出来,并给出了相应的结构参数范围。
根据模拟结果,他们制备出三个样品,分别实现了三个不同的耦合状态切换图。
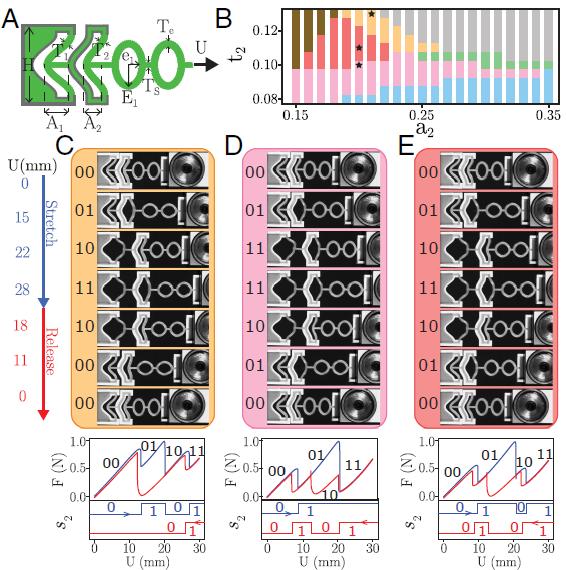 图 | 双曲梁串联系统的几何结构,实现不同状态切换图的参数范围,以及三个耦合状态切换图的实验结果(来源:PNAS)
图 | 双曲梁串联系统的几何结构,实现不同状态切换图的参数范围,以及三个耦合状态切换图的实验结果(来源:PNAS)接下来,则要实现更加复杂的记忆和运算。要想实现这一目标,就得打破回归点记忆(RPM,return point memory)。
回归点记忆,是广泛存在于各类材料中的一种记忆效应。它指的是:当系统重新承受先前的最大载荷时,系统状态也会回归到之前的状态。
而打破回归点记忆,则意味着系统在循环加卸载之下,能够达到不同的状态。
研究中,课题组发现:要想让串联系统打破回归点记忆,至少需要三个比特。
通过观察三比特系统的状态切换图,他们发现其中一个状态切换图所描述的系统,在加载和卸载的过程中累计打破了两次回归点记忆。
基于此,他们制备出一款实验样品——sample A,借此实现了不同载荷历史之下的计数功能。
刘静冉表示:“其实,基于状态切换图不仅可以计数,还可以实现更复杂的运算。”
在计算科学中,有这样一种重要的理论模型:有限状态机。它相当于是逻辑门运算“与”“或”“非”等的高阶版本。
在逻辑门运算中,系统的输入能够直接决定输出。而在有限状态机运算中,系统的输出不仅取决于输入,还依赖于系统的当前状态。
由于增加了“当前状态”这一变量、以及增加了系统的输入。因此,对于输出和状态来说,除了“0”和“1”以外,它们还有更多的选择。
而对于有限状态机来说,它比逻辑门拥有更强大的记忆能力和运算能力。
此前,已经有人通过机械装置实现了逻辑门运算。因此,该团队希望通过串联曲梁系统,实现更加复杂的有限状态机运算。
于是,在不同的位移输入信号之下,针对三比特串联系统的状态转换行为,课题组进行了一番研究。
结果发现:即使是同一个结构,但当引入不同输入信号的时候,也能实现不同的有限状态机。
例如:当引入两个不同的准静态脉冲位移输入,sample A 竟能实现 17 种不同的有限状态机。
而对于三比特系统来说,则能实现更多的有限状态机。比如,在实验中他们基于 sample A,已能实现 3 种有限状态机。
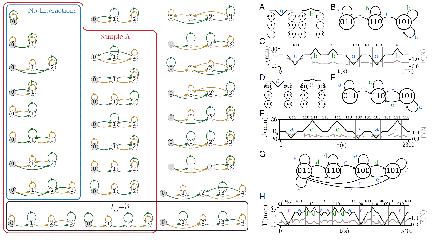 图 | 三比特系统有限状态机运算,输入信号为准静态脉冲位移(来源:PNAS)
图 | 三比特系统有限状态机运算,输入信号为准静态脉冲位移(来源:PNAS)
为极端条件下的信息处理提供备选方案
不过,本次研究只考虑了比特之间的串联耦合,以及在准静态位移控制下的系统状态转换行为。
后续,课题组会考虑更一般的耦合,例如并联耦合、以及同时存在串并联耦合等情况。同时,也可以将力控制、动态载荷等加载情况考量进去。
此外,刘静冉表示:“有时我们会听到一些质疑机械计算的声音,比如‘机械计算机早就被淘汰了’‘机械计算的速度没法和电子设备相提并论’。”
对此,她希望澄清以下两点:
其一,相比电子计算机面世之前的机械计算机,近年来最新研发的机械计算机有着本质区别。
以前的机械计算机主要用于数学计算,例如即便是史上功能最强大的纯机械计算机——差分机,其功能也仅仅是进行多项式运算,而且体积十分庞大[1]。
但是,近年来针对机械计算的研究,旨在寻求一种纯机械手段来处理非电信号,从而为在极端环境下的信息处理提供可能。
其二,机械计算机的速度和通用性,目前的确无法和电子计算相比。刘静冉等人也并不打算设计另一款电子计算机。
但是,在矿井、可燃气体泄露等救灾现场,电火花的产生可能会造成更严重的二次灾害。
而在这种情况之下,相比电力驱动型的机器人,具有纯机械信息处理能力的机器人,在抢险救灾上具备更高的安全性和可靠性。
就像量子计算只有在执行特定任务时,才能比传统计算机展现出更多优势一样,他们研究机械计算的目的,是为了在带电设备不可用的情况下,为处理信息提供另一种方法。
 参考资料:
参考资料:1.https://en.wikipedia.org/wiki/Difference_engine
2.Restrepo D, Mankame N D, Zavattieri P D. Phase transforming cellular materials[J]. Extreme Mechanics Letters, 2015, 4: 52-60.
3.Liu, J., Teunisse, M., Korovin, G., Vermaire, I. R., Jin, L., Bense, H., & van Hecke, M. (2024). Controlled pathways and sequential information processing in serially coupled mechanical hysterons. Proceedings of the National Academy of Sciences, 121(22), e2308414121.https://www.pnas.org/doi/10.1073/pnas.2308414121
运营/排版:何晨龙